2025年記事一覧
2025/12/24 揺動させたゴイル脚について
※2025年度かわロボアドベントカレンダーに投稿させていただいた記事になります。立命杯に向けてゴイル脚を試作、実践投入した。その結果と設計について書いていく
アームは既存の回転シールド、脚ユニットが今回試作したゴイル脚。
さっさと形にして試運転したかったため、3DPで試作。
 これが令和最新版ゴイル機体
これが令和最新版ゴイル機体
試運転動画~ツイッタより
1.概要
今回は以下コンセプトを満たせるような設計を目指した
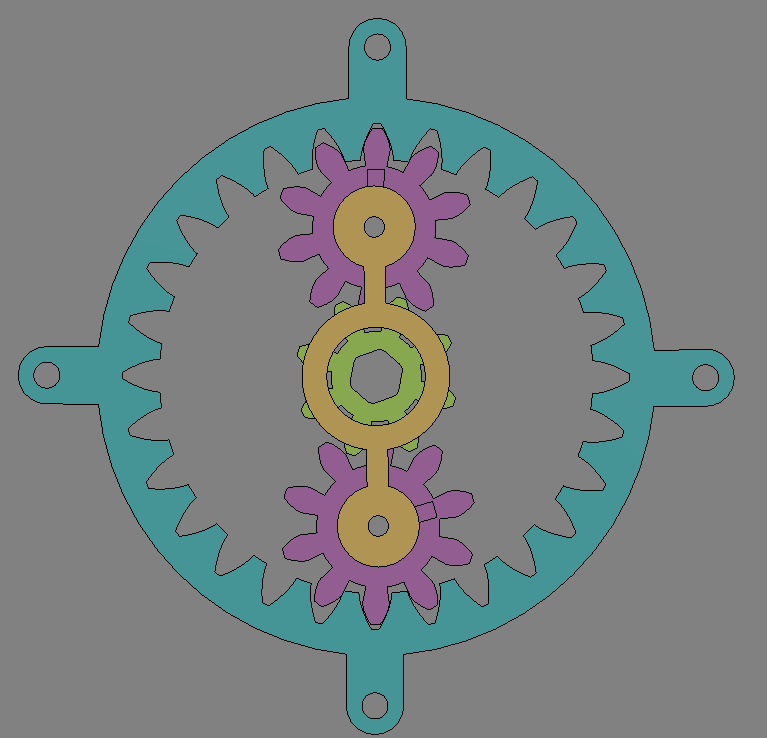
・薄く作る →減速ギアを原動節にして最小構成
・走破性を上げる工夫 →脚先をスライダリンクにして「なるべく」揺動させる。
常に地面に対して平行な位置になっているより、角度をつけたほうがタイヤに近づくから特に段差とかには有利なんでないかと思ったのがきっかけ。
薄さに関しては脚ユニットの幅(側板の外側同士)33mm。
ヘッケン脚ユニットの幅は57mmなので、当社比ではかなり薄くできていると思う。
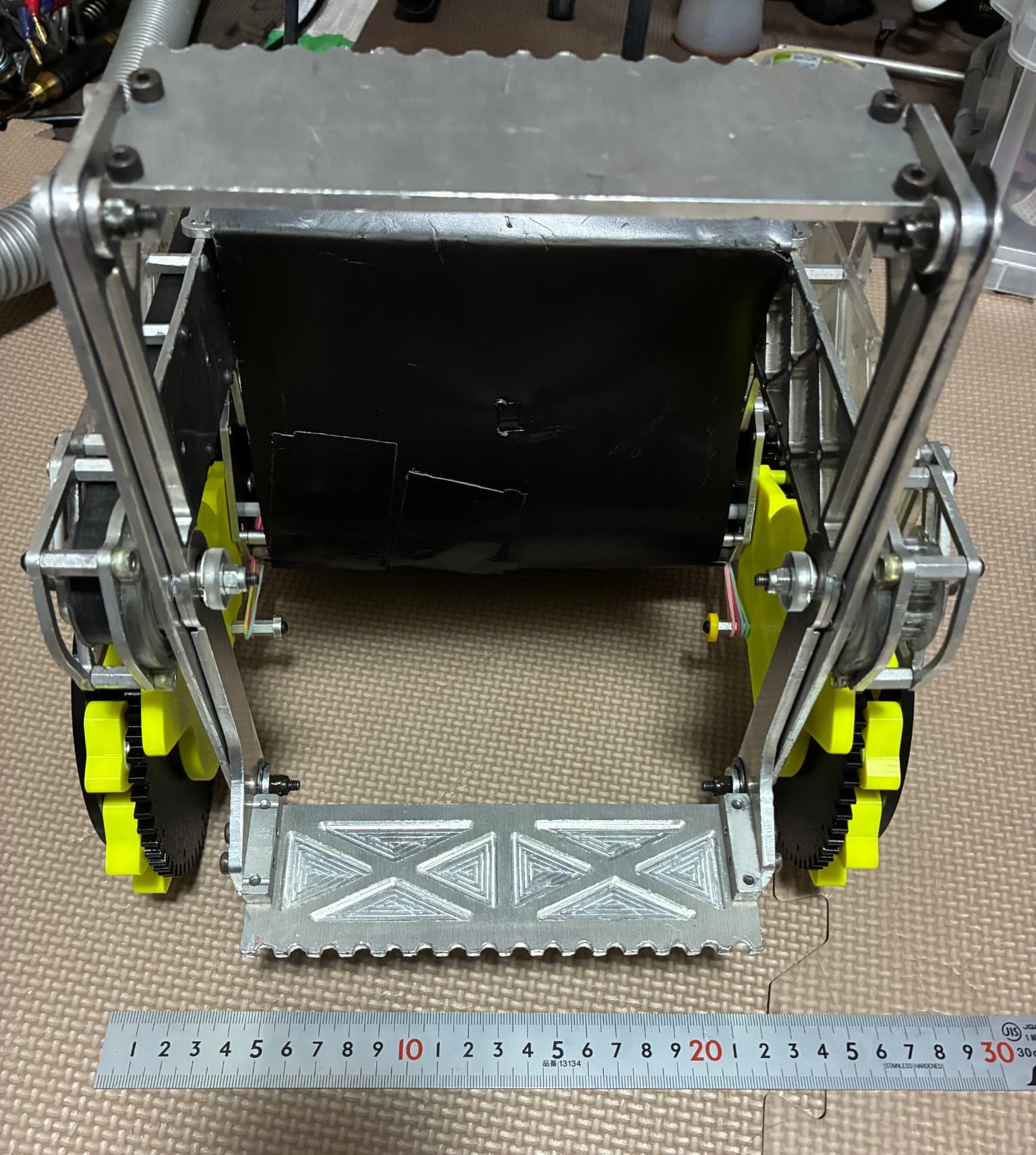
回転シールドに乗せたところ、機体幅270mmになりシールドの幅に余地ができすぎた。
横幅300mmの回転シールドも夢じゃない。小型機を丸呑みできるぞ!!
2.実戦投入してみて
と、いうのも1戦(ほぼ2分の激戦)で動作不能になり、その後フィールドを走ることはなかった。
試合中の動作感としては 震える!鳴る!滑る! で
揺動させるとかそういうレベルの話ではなく、 「超振動」をどうにか対策しないといけない。
平地で試運転させた時はそこまでスリップ感はなかったが、実際のフィールドだと段差で滑りまくっていた。
サスペンション機構は伝達ギアの軸から回転させて、緩い輪ゴムで引っ張っていただけなので、逆に推力が逃げてしまっていたみたい。
破壊箇所は以下
 脚ユニットが押されて歪んだ拍子に自分の回転シールドで殴って割れたとされる。破片をまき散らしてもうた
脚ユニットが押されて歪んだ拍子に自分の回転シールドで殴って割れたとされる。破片をまき散らしてもうた
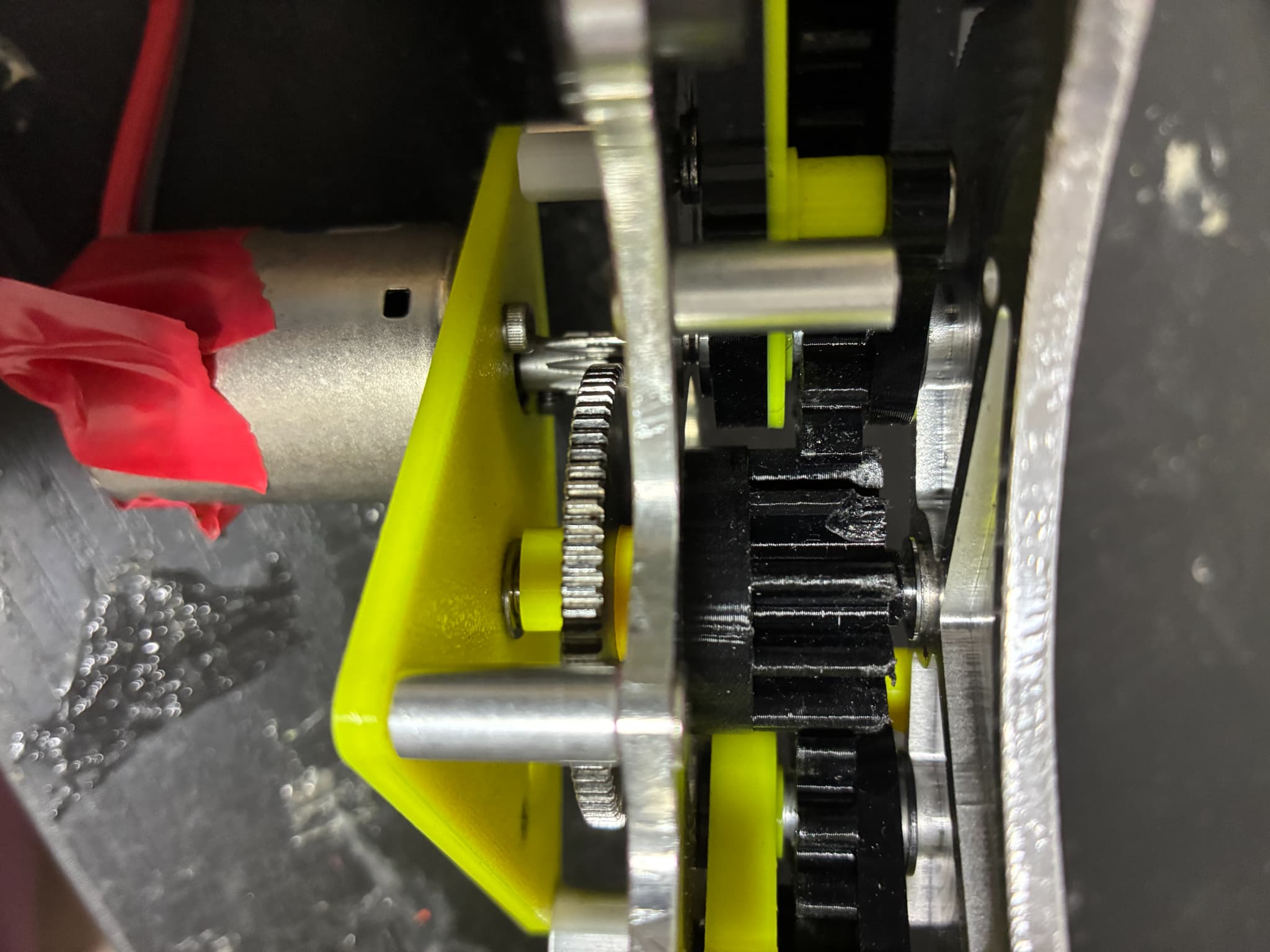 ギア欠け。これは単に組付けが悪く、嚙み合わせる位置が歯幅の端っこすぎた。
ギア欠け。これは単に組付けが悪く、嚙み合わせる位置が歯幅の端っこすぎた。
あとは脚のリンクが反転したりして、ロックした状態で無理やり動かそうとしたのもよくなかった。
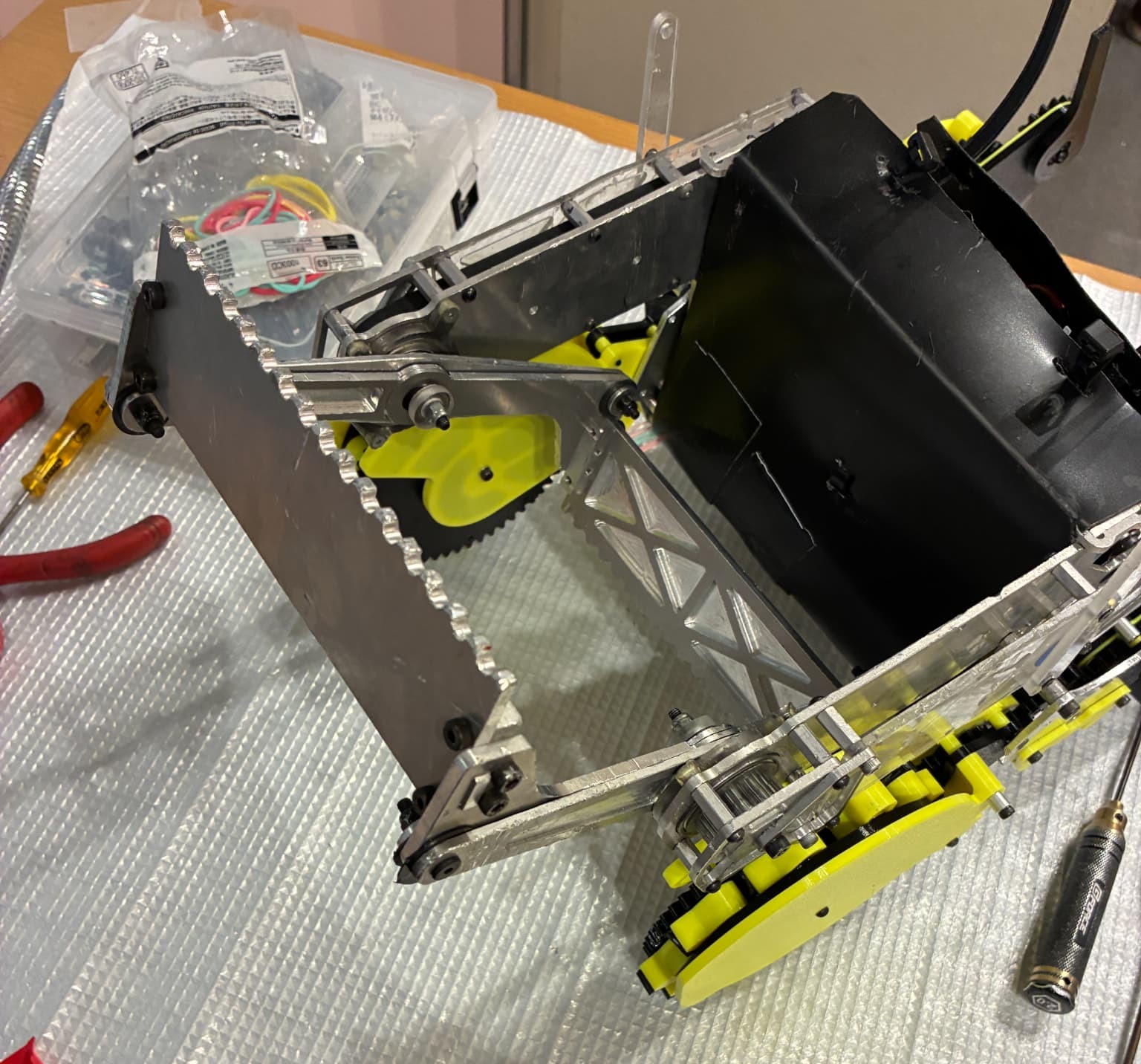
3.設計、内部構造
設計10月 印刷、組み立て11月〜立命館前日
切削だったら組み立てまで間に合って無かったと思う。作り直しを何回もしている時は3DPの恩恵を一番感じた。プリンタはbambu A1
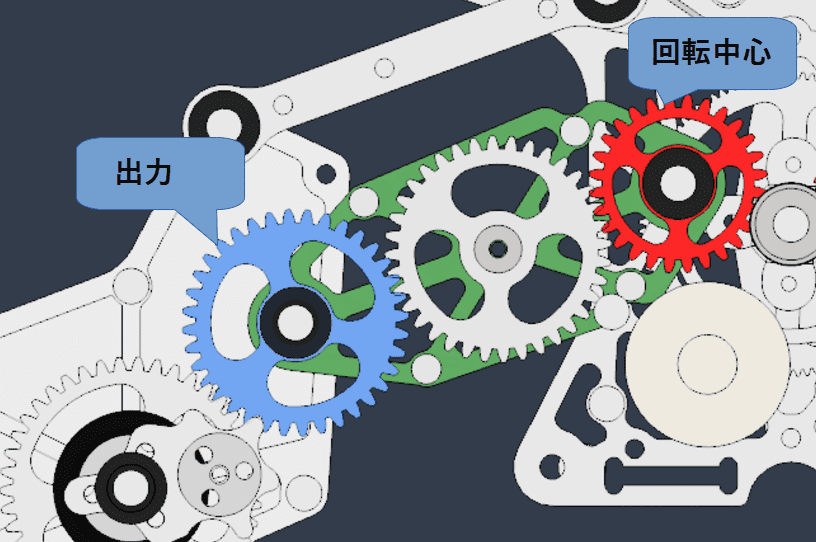
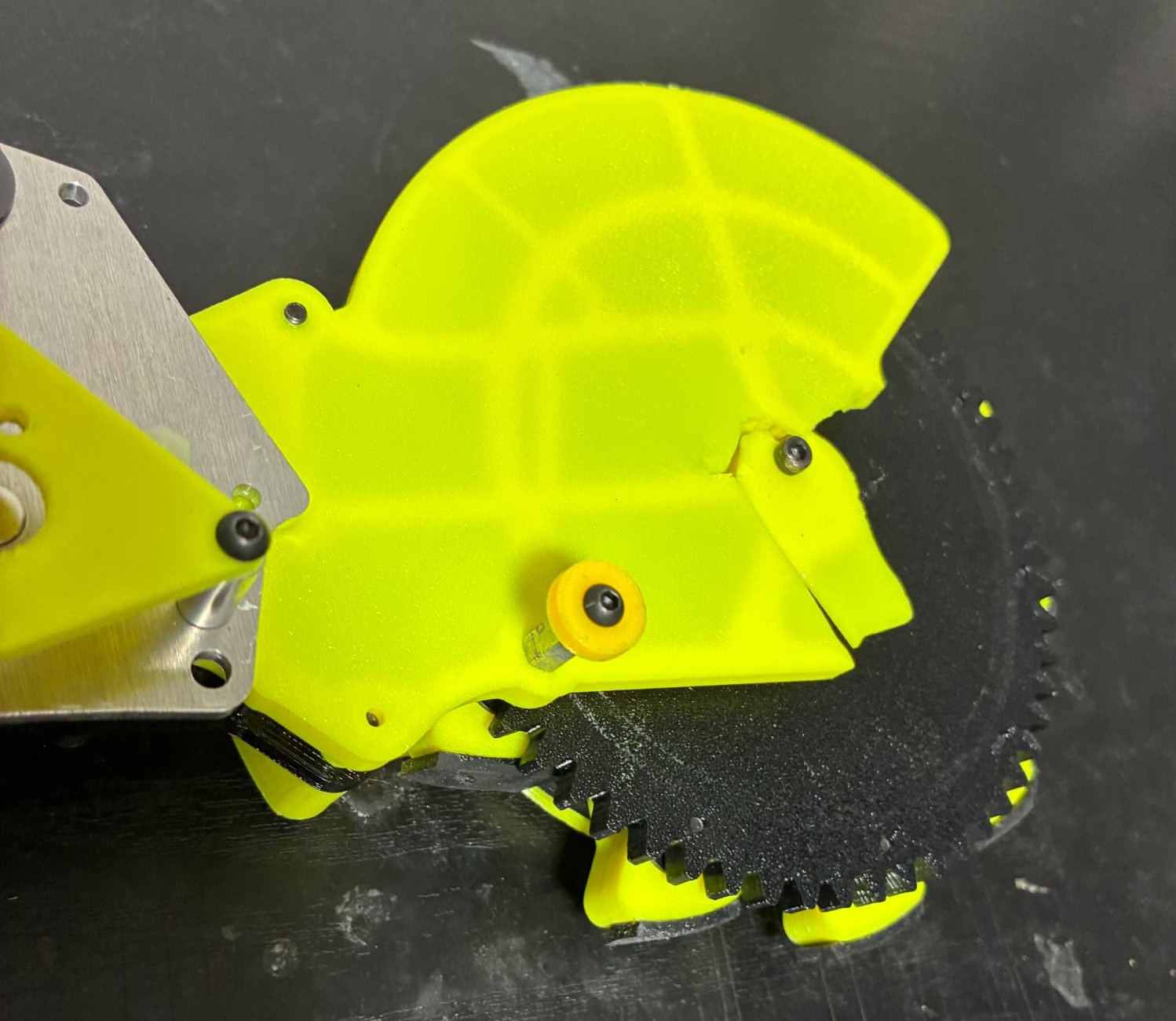
先端が地面をほぼ平行を向く系のブレードとリンクは同じで、原動節と長さの違う従動節を回転中心をずらして配置して、スライダ脚でつなぐ。

原動節、従動節、揺動節、固定節からなる。揺動節は各ユニット10個。1相。
素材はamazonのPETG脚先はシリコンシートを細かく切って貼っている。
プリントした脚に付きにくいのと設置面積も小さいからめっちゃ剥がれる。
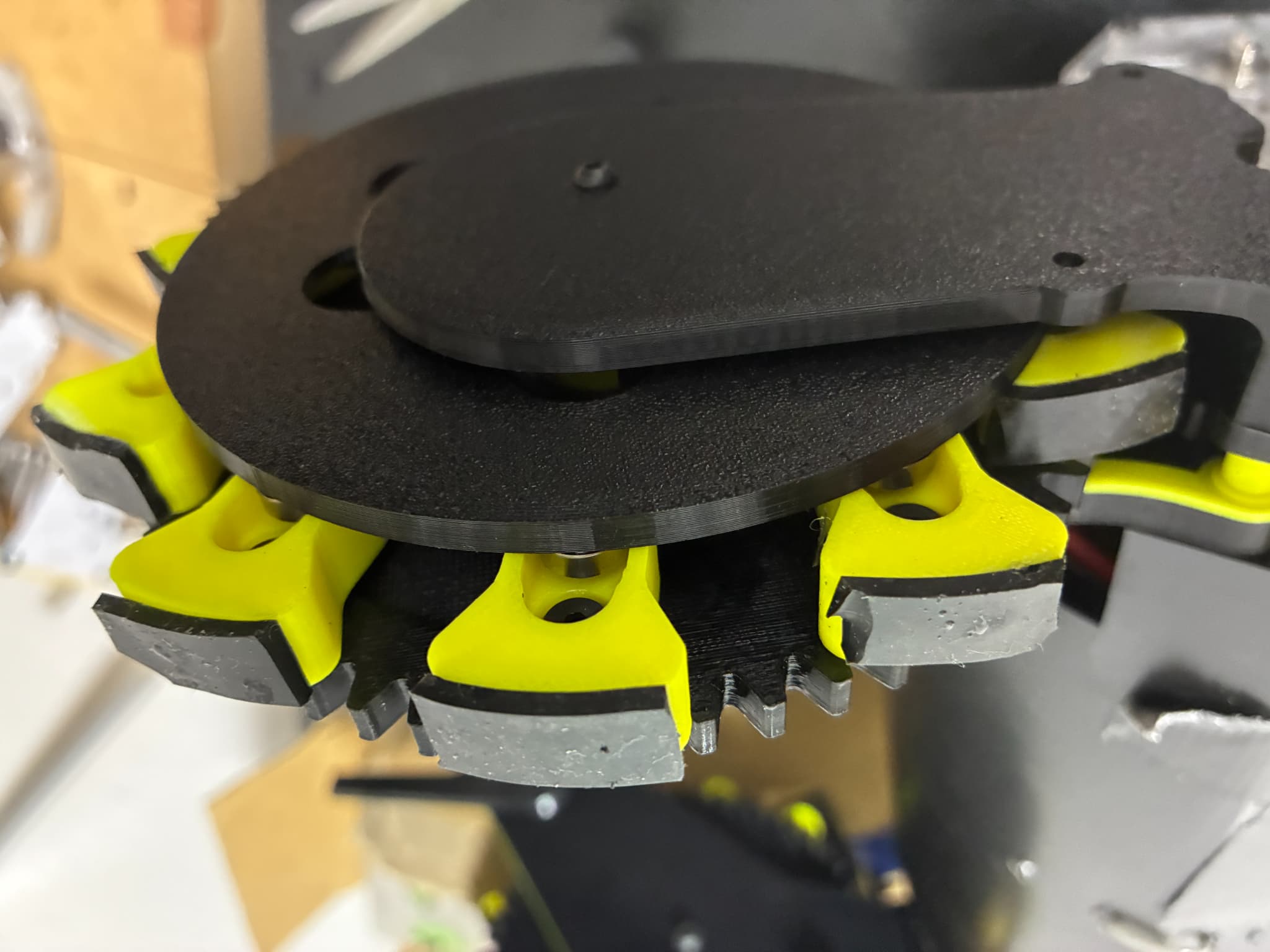
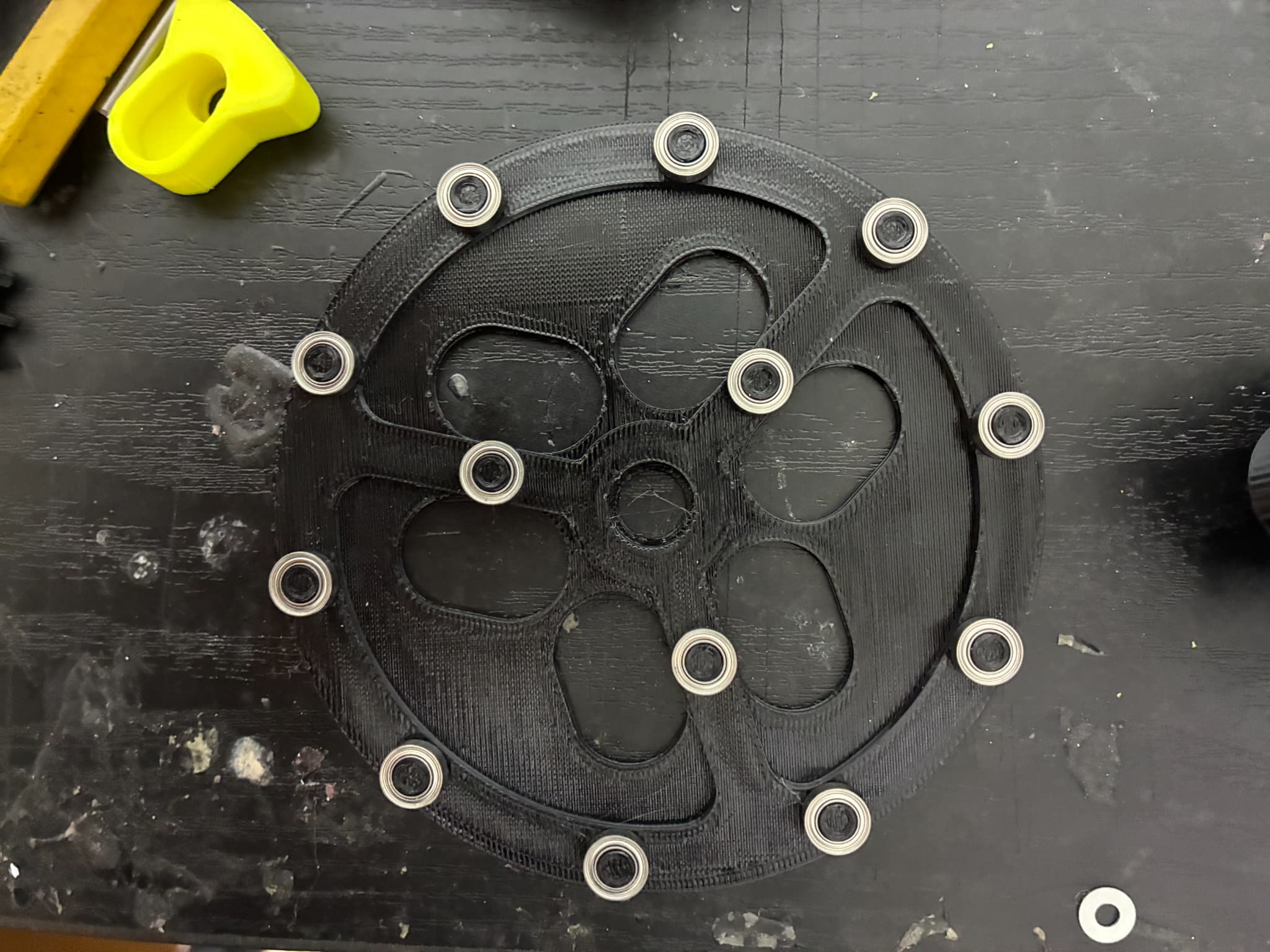
従動節を外すとこのような内部構造になる外側が揺動する脚先で、内側は平行リンクになっており、原動節から揺動節へ回転を伝達している。
摺動部分は全てベアリング!!
アリエクで計5000円くらい。はずれなしだった (6803ZZ x10pcs,MR95ZZ x60pcs,MR85zz x60pcs)
原動節にはφ5のアルミ軸に内径5外径8のベアリングを入れ、M3皿ネジ(頭φ6)で上からしめて抜け止めにしている。PETGに直接ネジを切っている。
 これは完全自己流だが、PETGはφ2.7くらいの穴にネジを押し付けて無理やり締めることで緩みにくいタップが切れる。粘っこさのせいでネジが食いついて全然弛まない。
これは完全自己流だが、PETGはφ2.7くらいの穴にネジを押し付けて無理やり締めることで緩みにくいタップが切れる。粘っこさのせいでネジが食いついて全然弛まない。
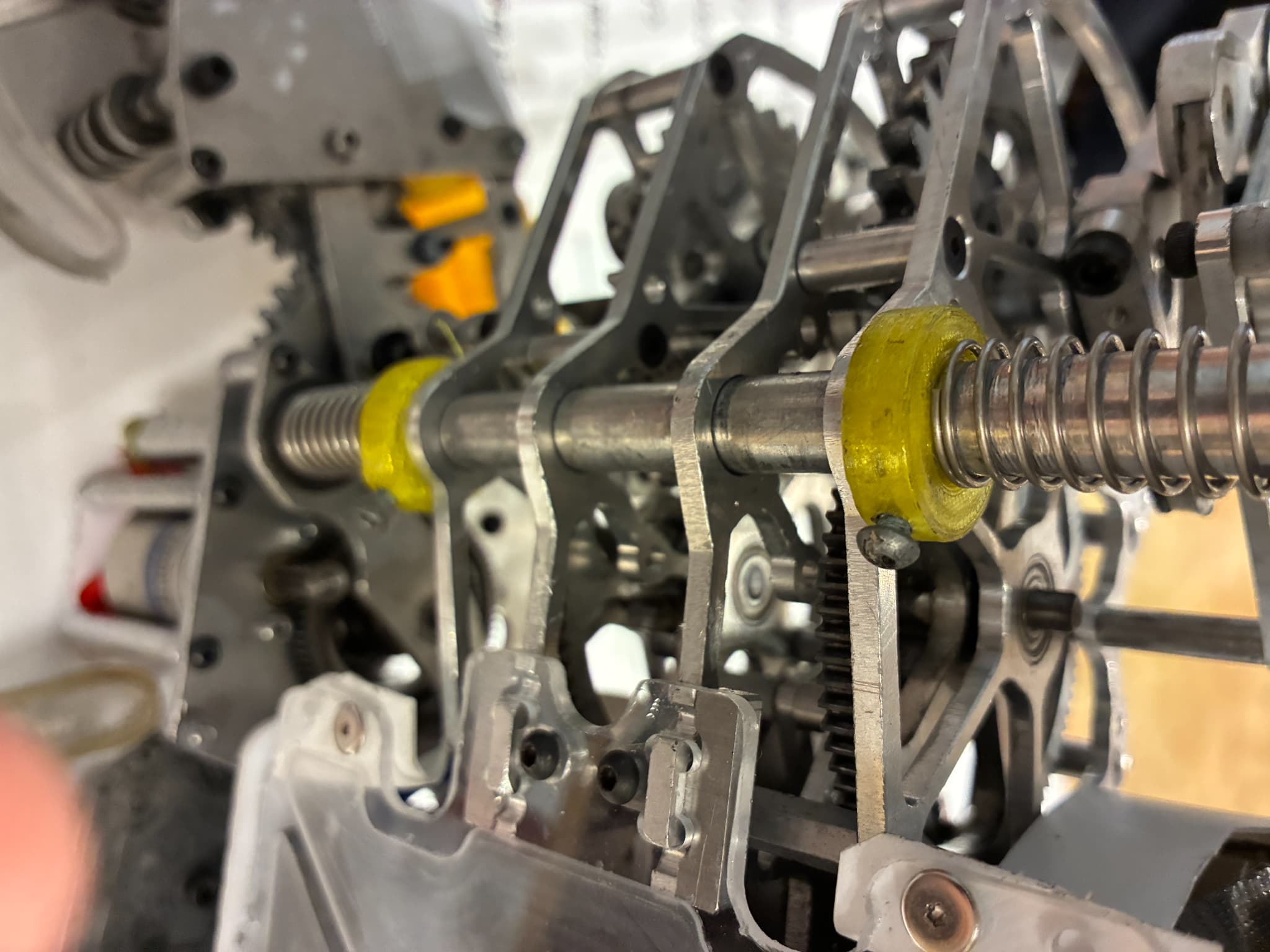
このパイン飴みたいなのが5年ものの自作セットカラーで繰り返し開け閉めしても耐えている。
スライダ脚は原動節のベアリングが通る穴はφ8 スライダのベアリングはφ9にすることで反転防止のストッパを設けた。
片面から切削でつくれるようになっている。
従動節は3dプリンタで軸まで生やし、ベアリング入れてから先端をかしめて抜けないようにしている。
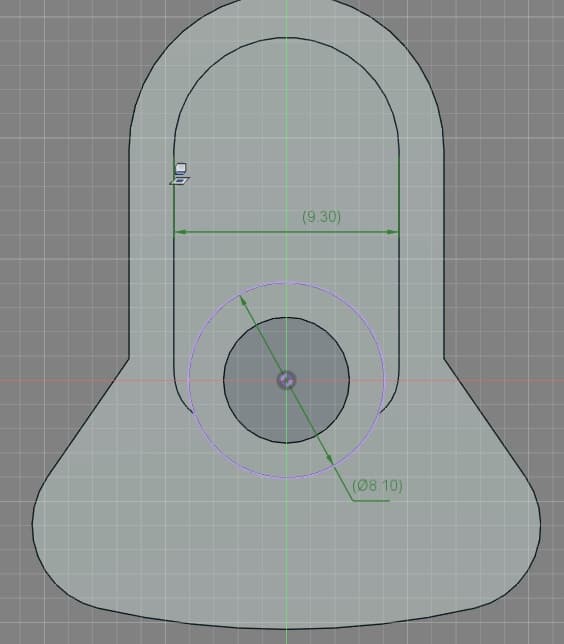
このパラメータは切り替えしをギリギリまで攻めている。原動節と揺動節が一番近い時で2.4mm これを2.0mmで作った時はリンクがすぐ反転して脚先が1回転してしまった。
修正後でも動かしている間に反転することがたまにあったので、攻めすぎは禁物。各パーツの剛性も重要になってくる。
4.まとめ
脚幅が薄くできるというのはメリットだが、現代のバトルスピードについていくにはまだまだ改良が必要。
リンク構造、サスペンション、足裏等々
4脚ともゴイルにせずとも後脚はヘッケンでもいいのでまたリベンジしたい