機体紹介
アーム種別ごとの各年の製作機体*は稼働中
| 2017 | 2018 | 2019 | 2020 | 2021 | 2023 | 2024 | 2025 | 2026 | |
| ロッド | 餅 x3 | 饠 | 餡 | 饅 | 饅(ver2)* | ||||
| 回転シールド | 輝* | ||||||||
| 横回転 | 暗 | 蟹 | |||||||
| ブレード | 㹜* | ||||||||
| シールド |
餅 x3 (はなよりだんご)
2017年製作 ロングロッド
初めて作ったかわロボ機体。かっこよくて強そうだったからロングロッドに!
小型シールドも猛威を振るっていたので、ロッドの先端にシールドをつけたら強いんじゃねというコンセプトが団子になった。
モータが前脚の上に2つあるという超前重心機体だが、大型だけあって走行中は意外と安定している。
脚の樹脂ギアやアームのギアを壊しながらひたすら修理して試合しまくった思い出。
・脚機構:ホイールベース 200、ヘッケンクランク 3相(R67)、クランク半径 20mm、減速比 40、 モータ片側2発ずつ
・アーム機構:4節リンク 減速比 312.5、モータ3発、ロッド長さ700程度
饠(ぴらふ)
2018年製作 ミドルロッド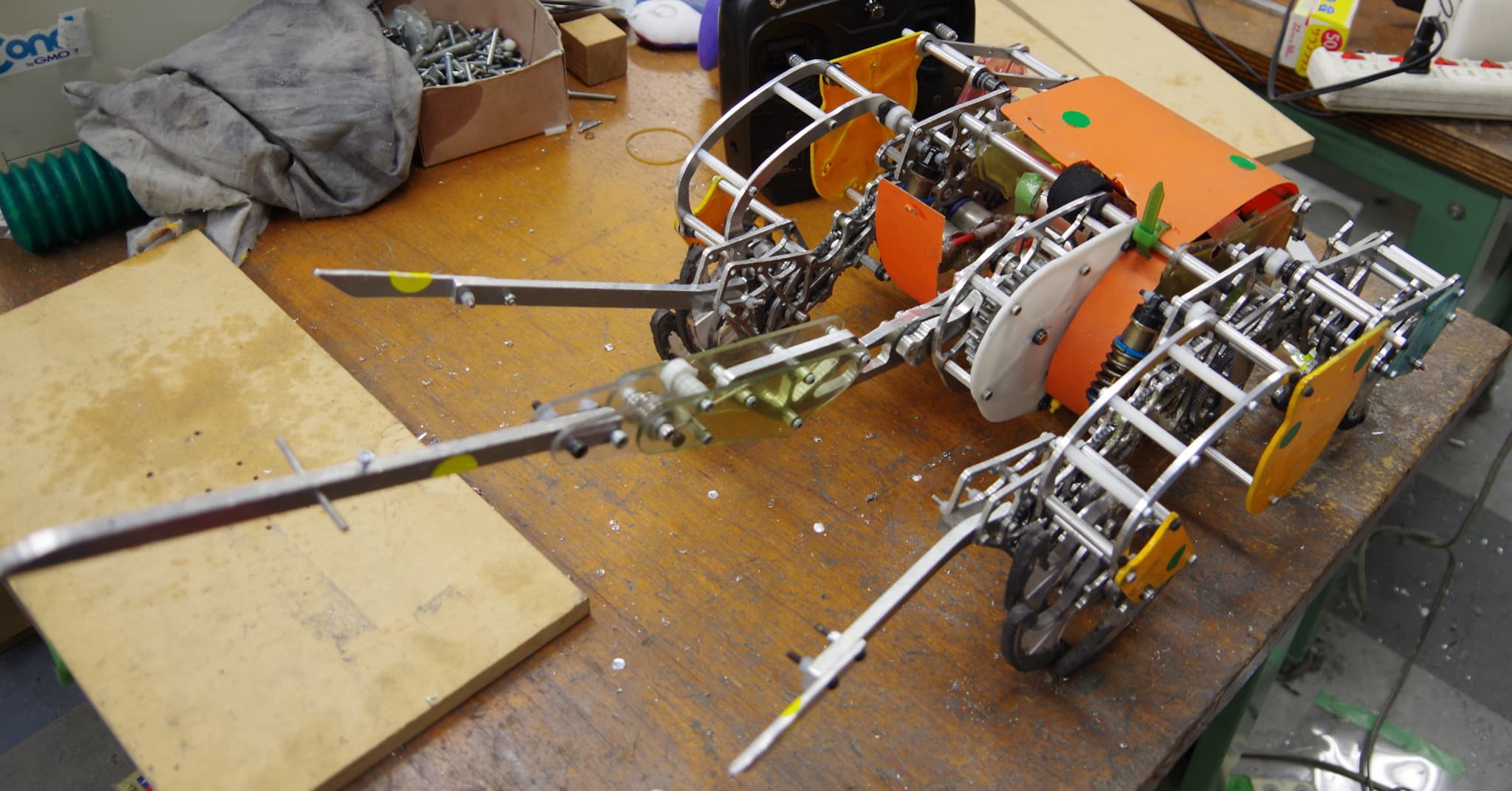
「餅」の改良機。サスペンション搭載やオムニ脚の導入である程度のバトルスピードについていけるようになった。
(サスペンションはギアを偶数枚で組んでいたからちゃんと機能していたか不明)。
この年の本大会で敗復を乗り越え初めて決勝トーナメントに出場でき、一番試合もこなした機体だったと思う。
台形リンクは相手を投げる時(サスが下がる時に)にカウンタが下を向いてくれるようにしたが、
パーツ配置が難しい割に恩恵を感じなかった
・脚機構:ホイールベース 220、ヘッケンクランク 4相(R62)、クランク半径 15mm、減速比 35、 モータ片側2発ずつ 台形リンクサス、後ろ脚オムニ
・アーム機構:4節リンク 減速比 250、モータ3発、ロッド長さ450程度
餡(あんかけぴらふ)
2019年製作 稼働カウンターロッド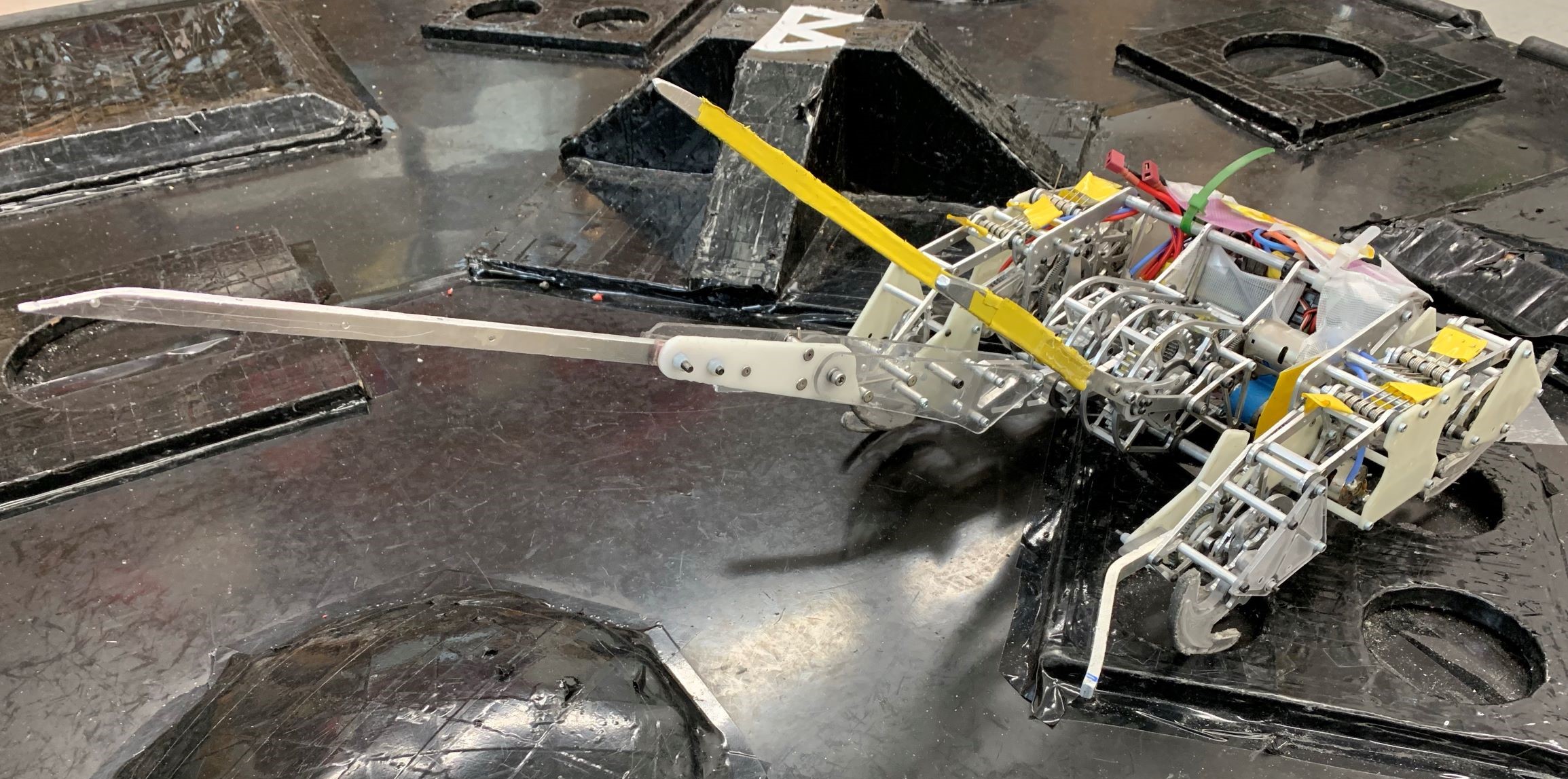
4chに憧れて稼働カウンターを搭載。軽量化やアームの組み方で苦労した。
操縦は難しくて勝ちにくいけど、とにかく動かしていて楽しかった。 某六本木のtv番組にも出演。
本当はあれ用に作っていたロッド機があったが、リハの時にアームのパーツがとれてしまい、撮影翌日の練習会用に持ってきていたこいつを撮影本場に出すことに
最初はサブアームはロッドではなく押しだシールドだったが、カウンタとして機能してくれなかったので即没にした。

・脚機構:ホイールベース 230、ヘッケンクランク 3相(R60)、クランク半径 15mm、減速比 35、 モータ片側1発ずつ 平行リンクサス、後ろ脚オムニ
・アーム機構(メインとサブ共通):4節リンク 減速比 240、モータ2発、ロッド長さ600程度
 メインアームの従動節はサブアームの伝達軸を避けるため湾曲した形状にする必要があり、
可動域超えで動かそうとするとポッキリいってまう。
メインアームの従動節はサブアームの伝達軸を避けるため湾曲した形状にする必要があり、
可動域超えで動かそうとするとポッキリいってまう。
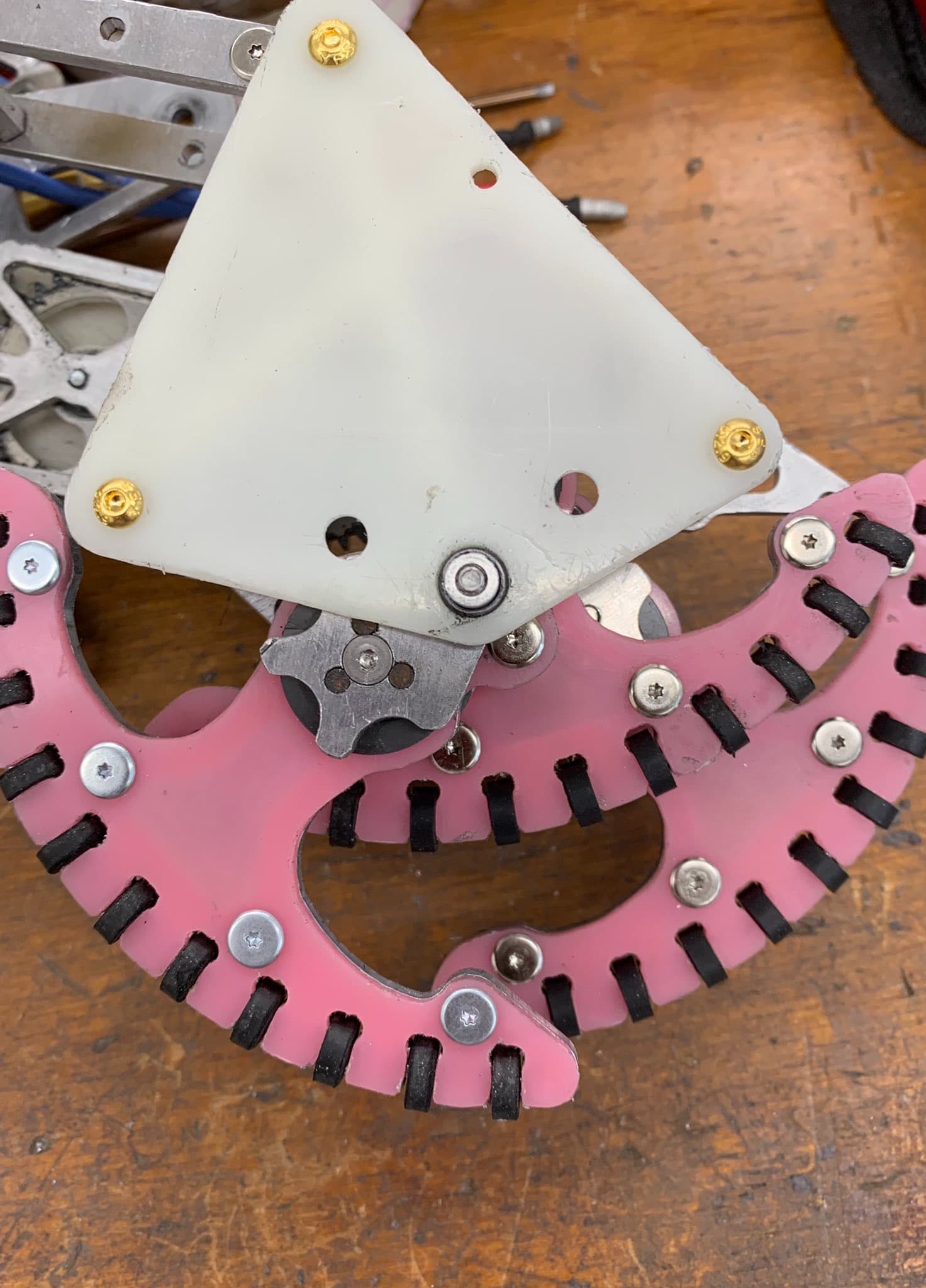 オムニ脚
オムニ脚
饅(まんじゅうこわい)
2020年製作 展開式稼働カウンターロッド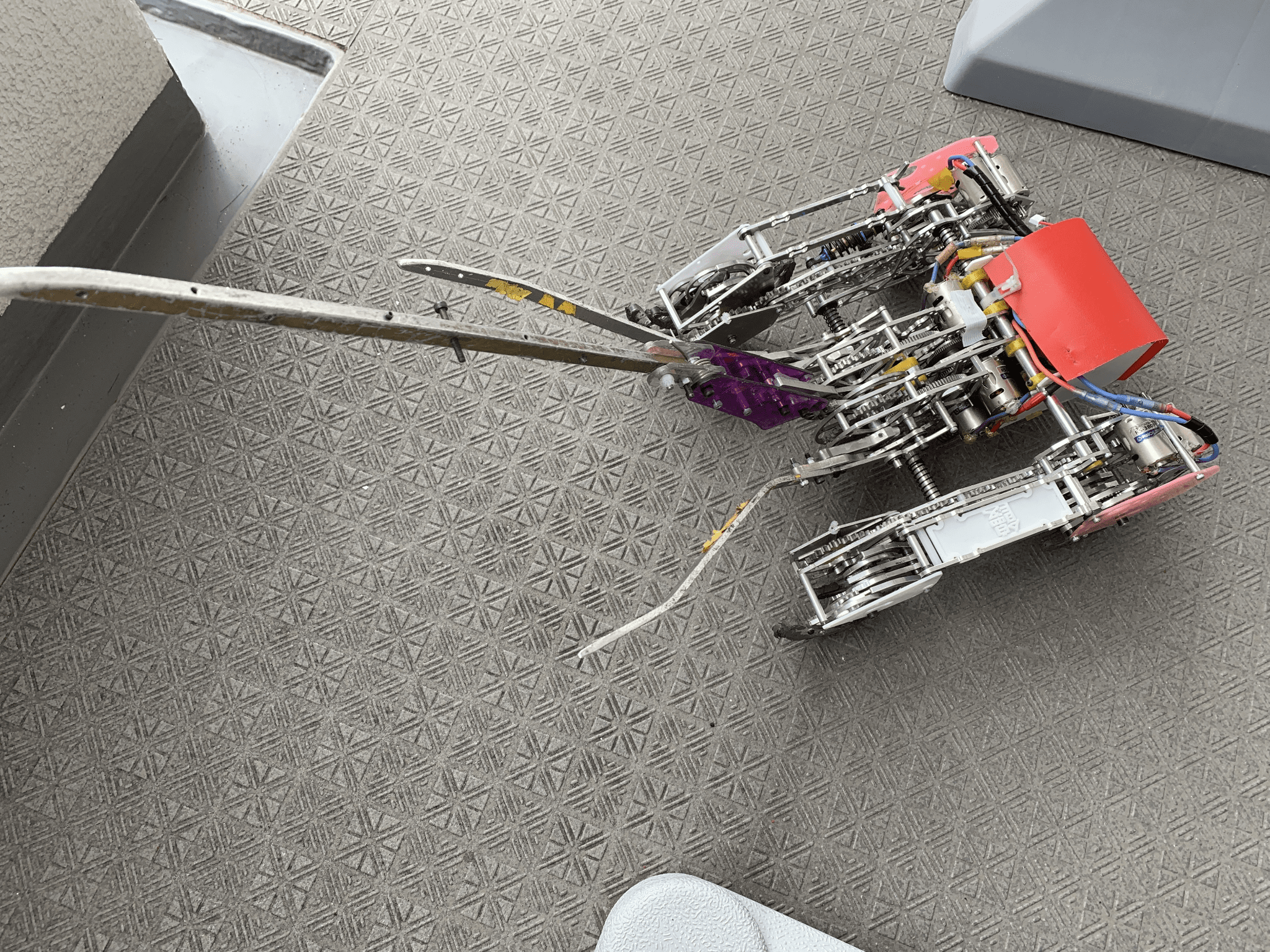 初期型
初期型 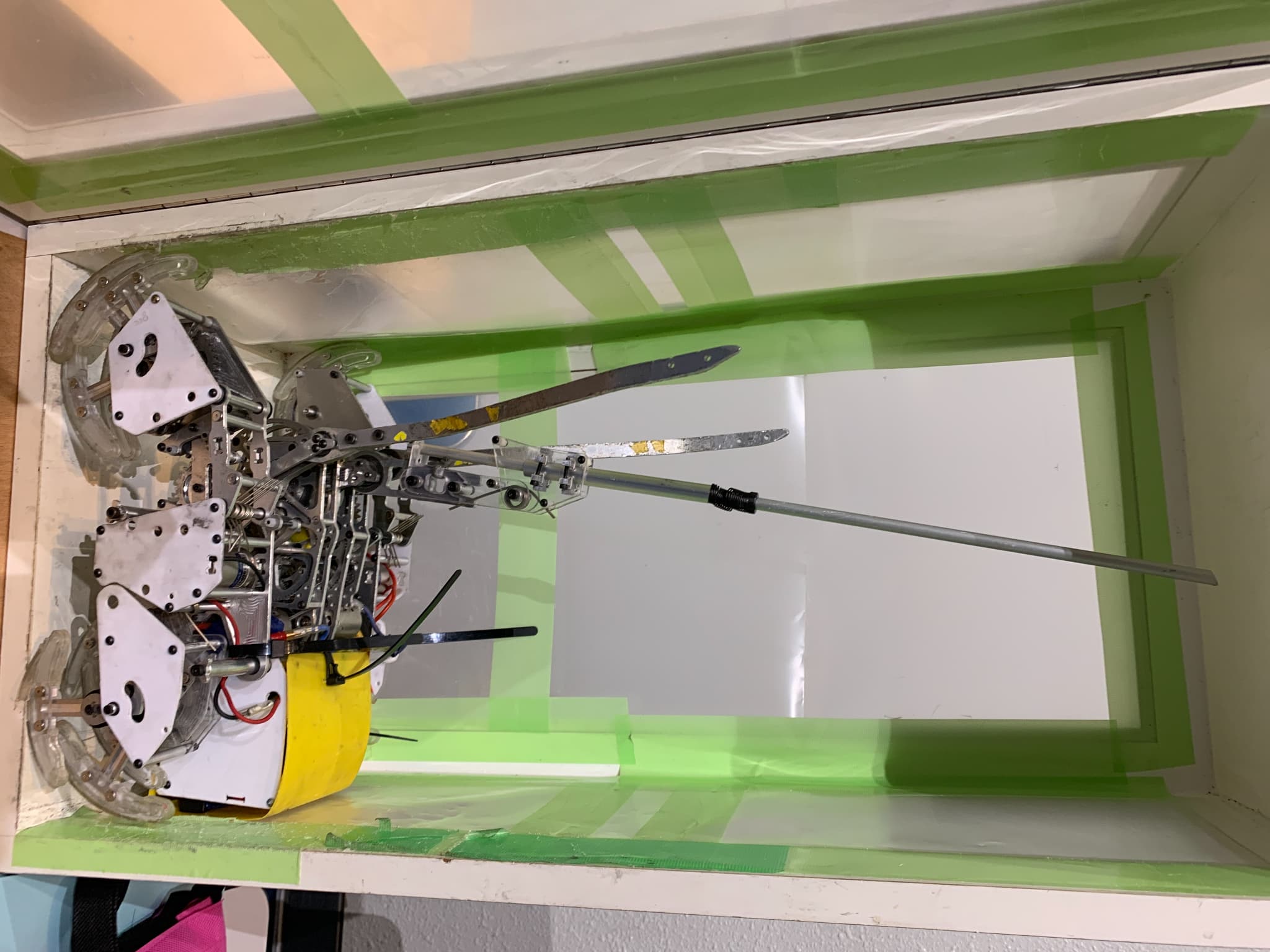 改良型 ver2
改良型 ver2 夢の展開スタート稼働カウンター(からっ風リスペクト)。スタートダッシュ+長射程で転倒スタート機を頬むる妄想をしていた。
「餡」より車体が小さいせいで脚操縦が難しく、車体がアームの動きに持っていかれてる感じだった
初期型は前足のみのサスだったが、改良型では両サス+重心バランスも調整してそこそこ思うように走り回れるようになった。
メイン機として長く使っているが、まだまだ機体のポテンシャルを引き出せていないと思う。
・脚機構:ホイールベース 210、ヘッケンクランク 4相(R60)、クランク半径 15mm、減速比 35、 モータ片側2発ずつ
平行リンクサス(前のみ)
・アーム機構(メインとサブ共通):4節リンク 減速比 297、モータ2発、ロッド長さ600程度
スペック(ver2)
・脚機構:ホイールベース 210、ヘッケンクランク 4相(R62)、クランク半径 15mm、減速比 43、 モータ片側1発ずつ
平行リンクサス(前)、回転リンクサス(後)
・アーム機構(メイン):2025以降リンク廃止してギア直結 減速比 297、モータ2発
・アーム機構(サブ):4節リンク 減速比 297、モータ2発、ロッド長さ600程度
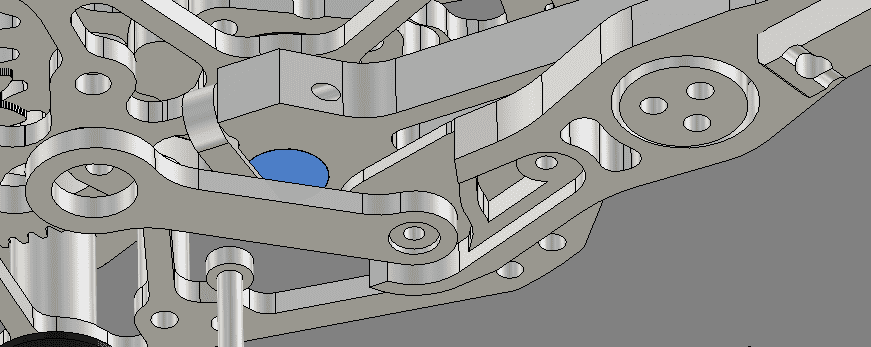
サブアームが4節リンクのままなのは理由があって
①サブアームを下げすぎないようにリンクの軌道で規制するため。
→稼働カウンターは相手を投げる時にカウンターも下に投げる必要があるが、下げすぎるとウィリーして自分が不安定な姿勢になるのことの対策。
②伝達軸の緩み対策
→ギアと原動節はφ10軸のDカットで伝達しているが、原動節の先端に直にロッドをつけて地面をはたくと、締結部が滑ってしまった。
締結部分を強化するのがごもっともな対策だが、①の理由とも併せて締結が多少滑っても4節リンクで保持できるようにした。
暗(あんこくぴらふ)
2021年製作 上下動付き横回転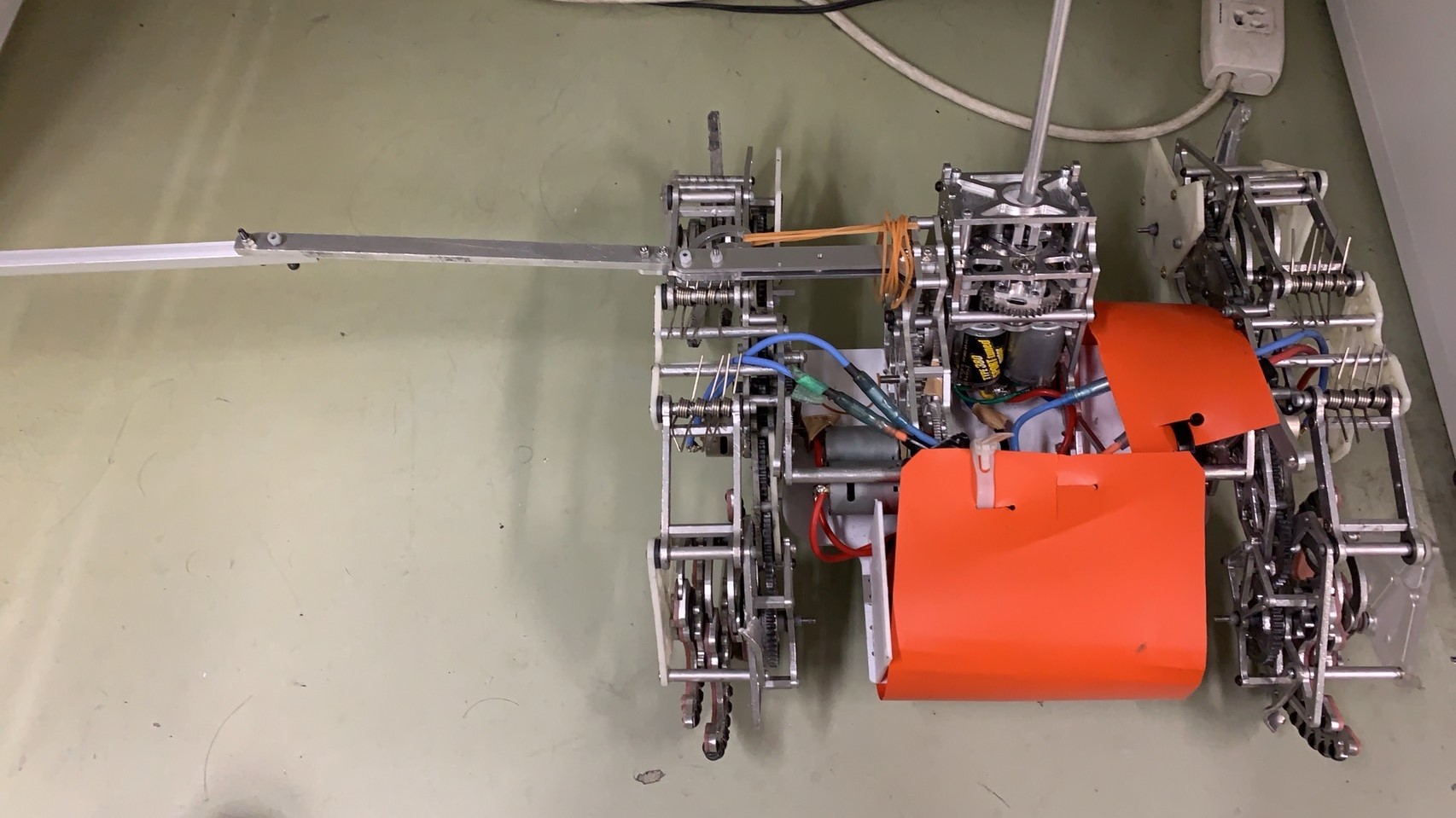
流行りに乗って横回転を作ったがすぐ飽きたというかコロナ渦で試合する機会があんまりなかった。
脚ユニットは「餡」をそのまま移植
アームが速すぎて、フルスロットルで回すと車体が大きく揺れる
・脚機構:ホイールベース 230、ヘッケンクランク 4相(R60)、クランク半径 15mm、減速比 35、 モータ片側2発ずつ
平行リンクサス(前のみ)
・アーム機構(横回転):スライダリンク 減速比 90、モータ4発
・アーム機構(上下機構):スライダリンク 減速比 140、モータ2発
輝(てぃろふぃなーれ)
2021年製作 回転シールド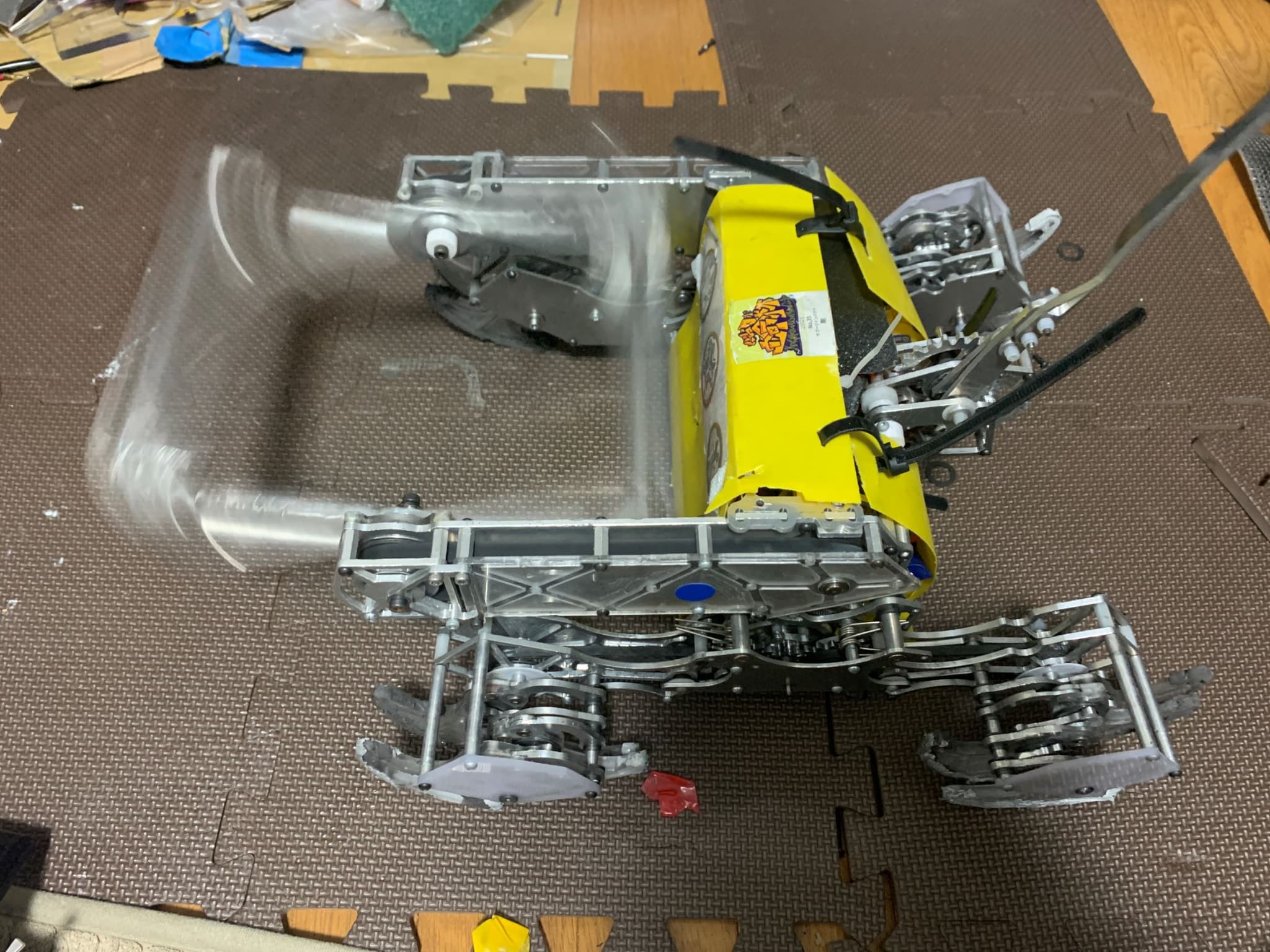
ロマン砲。パワー+扱いやすさを目指した機体
復帰機構も搭載
脚回りは安定感があって操縦しやすかったが、山を殴って場外など最終的には自分との戦いになると感じたアームだった
・脚機構:ホイールベース 250、ヘッケンクランク 4相(R62)、クランク半径 15mm、減速比 35、 モータ片側2発ずつ、回転サス
・アーム機構(メイン):スライダリンク 減速比 24、モータ4発、回転半径 120
・アーム機構(復帰):4節リンク 減速比 217、モータ1発
蟹(かにーば)
2023年製作 横回転
自由に蟹歩きさせるのがコンセプトだったが、設計が詰めきれておらず中途半端になってしまった。
横向きの脚ユニットが真ん中に配置されているが、
実際には左右の脚ユニットより少し浮いているので平地では設置せず、山の上に乗り上げた時のみ設置して横移動する。
好きなタイミングで横移動させるには横移動のユニットを操縦で上げ下げできる機構がいるが、そこまでする重量もモチベも今はない。
ただ、展開スタートで相手より先に山に張り付いて鎌をひかっけに行くという戦い方が意外と強かった。
・脚機構:ホイールベース 126、ヘッケンカム 4相(R60)、クランク半径 13mm、減速比 40、 モータ各1発ずつ、 全脚オムニ
脚ユニットが左右と中央に1つあり 計16足
・アーム機構:スライダリンク(横回転)+スライダクランク(復帰) 減速比 187.5、モータ2発
 アーム機構は共通の減速部分が横回転機構と復帰機構に接続されている。
アーム機構は共通の減速部分が横回転機構と復帰機構に接続されている。
㹜(オルトロス)
2025年製作 展開式ブレード
回転シールドと違ってブレードなら左右にユニットを分けられるし
中央の山をはさんで両側から攻めたら強いんじゃねという思想から制作が始まった。
デビュー戦の第104回ブレード杯では展開スタートがまともにできず、出オチだったのでリベンジしたい。
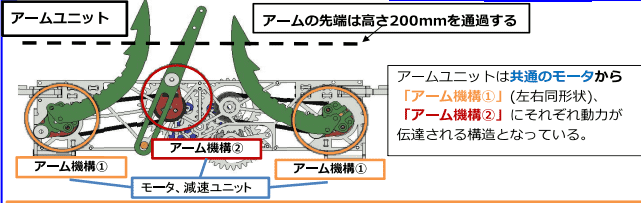
・脚機構:ホイールベース 204、スライダヘッケンカム 3相(R55)、クランク半径 10mm、減速比 31.4、 モータ各1発ずつ
・アーム機構:ギア直結 減速比 33.8、モータ3発、回転半径 135